设计说明
源代码位于:
-
bsp/artinchip/drv/pwm/drv_pwm.c,PWM Driver 层实现
-
bsp/artinchip/hal/pwm/hal_pwm.c,PWM HAL 层实现
-
bsp/artinchip/include/hal/hal_pwm.h,PWM HAL 层接口头文件
-
bsp/artinchip/drv/epwm/drv_epwm.c,EPWM Driver 层实现
-
bsp/artinchip/hal/pwmcs/hal_epwm.c,EPWM HAL 层实现
-
bsp/artinchip/include/hal/hal_epwm.h,EPWM HAL 层接口头文件
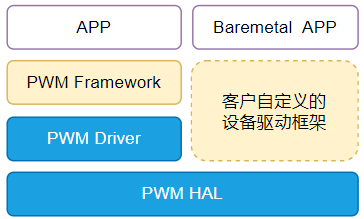
模块架构
PWM/EPWM 驱动 Driver 层采用 RT-Thread 的 PWM 设备驱动框架。HAL 层也可以支持 Baremetal 方式或配合自定义的设备驱动框架进行使用。(下文仅以 PWM 作为说明,EPWM 同理)
关键流程设计
PWM 驱动的初始化接口通过
INIT_DEVICE_EXPORT(drv_pwm_init) 完成,主要是通过调用 PWM 子系统的接口
rt_device_pwm_register() 注册一个 PWM 设备。
PWM 控制器的初始化过程,主要步骤有:
-
初始化模块的 clk
-
初始化模块的默认参数
-
向设备框架中注册 PWM 设备
数据结构设计
- struct aic_pwm_arg:属于 HAL 层接口,记录每一个 PWM
通道的配置信息
struct aic_pwm_arg { u16 available; u16 id; enum aic_pwm_mode mode; u32 tb_clk_rate; u32 freq; struct aic_pwm_action action0; struct aic_pwm_action action1; u32 period; u32 duty; s32 def_level; enum pwm_polarity polarity; }; - struct aic_pwm_action:属于 HAL
层接口,记录一组 Action 的配置信息
struct aic_pwm_action { enum aic_pwm_action_type CBD; enum aic_pwm_action_type CBU; enum aic_pwm_action_type CAD; enum aic_pwm_action_type CAU; enum aic_pwm_action_type PRD; enum aic_pwm_action_type ZRO; };